Introduction
This post builds on the first part of maze posts where a formalism and a procedure were introduced to create maze images. We are going to turn pictures to mazes. The algorithms purposed so are discussed at length.
Notes
The raw notebook can be found here. The source of the various maze generating utilities are deposited in this repo.
Recycling
The previous blog proposed that the creation of a maze is comprosed of six stages.
- specification
- defining the objects
- from which the pre-maze is assembled
- the links of the maze are marked
- preparing the objects to be drawn according to the links
- the maze is rendered
At least two stages require no development
-
- the already implemented loop-erased random walk algorithm will select the links
-
- the primitive drawing subroutine will render the maze
1. Delaunay maze
1.1. Specification
We wish to turn the image in the lest panel of Figure 1. to a Delaunay maze.
1.2. Maze objects
The maze objects are triangles which are spanned by the non-blank pixels of the original image.
1.2.1. Image preparation
The maximum width and the height of the image given in pixels are constrained by the size and the resolution of the final maze. I.e. the final maze image has practical limits on its size. The finite resolution of the raster image defines the physical width of a drawn line. The ratio of one fifth between line width and minimum spacing between parallel lines is aesthetically pleasing according to the scribbler of these lines. Therefore, if
- $l = \sqrt{w h}$ is the approximate width of the maze
- $d$ is the line width
- $m=5$ is separation between lines in multiples of the line width then a maximum $N \approx l / (m + 1) d$ of image points are allowed in one dimension of the maze image.
The starting image then either needs to be not larger than $N \cdot N$ or it requires downsampling using your favourite method.
Downsampling also condenses the information encoded in the image which are hopefully recreated by the maze lines. There will be more points, thus triangles, thus lines in the darker regions of the original image. Where the photograph is lit, the lines will be sparse. The role of shading is transferred from hints of grey to density of lines. Figure one shows these there images. Please note that the original image is resized too.
The original greyscale photograph needs to be binarised in order to create the points over which the triangles are spanned. The Again, books have been written on binarising images. Choice is yours, don’t be grey.
# load image
img = load("<path-to-image>")
img = imresize(img, ratio=0.25)
# quantise colours
img_binary = binarize(img, AdaptiveThreshold())
points_all = convert(Array{Int}, Gray.(img_binary))
 Figure 1. The original (left panel), the resized (middle panel) and the binary images (right panel).
Figure 1. The original (left panel), the resized (middle panel) and the binary images (right panel).
1.3. Pre-maze
All of the Delaunay maze code written in Part 1. can be reused once there is a pointset across which the triangulation spans.
The extract_coords function is instructed to return the 2D grid indices of the black points in an image. The binary image is in the points_all variable.
xy = extract_coords(points_all, 0)
# 2×69578 Matrix{Int64}:
# 5 6 7 11 14 16 17 25 26 33 … 353 354 355 356 357 358 359
# 1 1 1 1 1 1 1 1 1 1 480 480 480 480 480 480 480
The coordinates are then scaled with a constant to create space for the line to be drawn on a bitmap.
width_line = 1
factor = 5
xy .*= (width_line + factor)
# 2×69578 Matrix{Int64}:
# 30 36 42 66 84 96 102 150 156 … 2124 2130 2136 2142 2148 2154
# 6 6 6 6 6 6 6 6 6 2880 2880 2880 2880 2880 2880
4–6. Links, drawing object preparation, rendering
Creating and drawing the maze is a trivial affair with the functions developed in the previous post.
# create a Deluanay graph
tri_graph = TriGraph{Int}(xy)
# make a maze
links = make_loop_erased_random_walk_maze_links(tri_graph)
# mark up triangle side to draw
ptd = select_sides_to_draw_tri(tri_graph, links)
# render image
img_maze = draw_lines_on_bitmap(5000, 6000, ptd, 1)
The entire Deluanay maze is shown in Figure 2. along with a detail. The lightness of the original photograph has indeed been translated to triangle densities. The full size maze can be found here.
{kind=link}
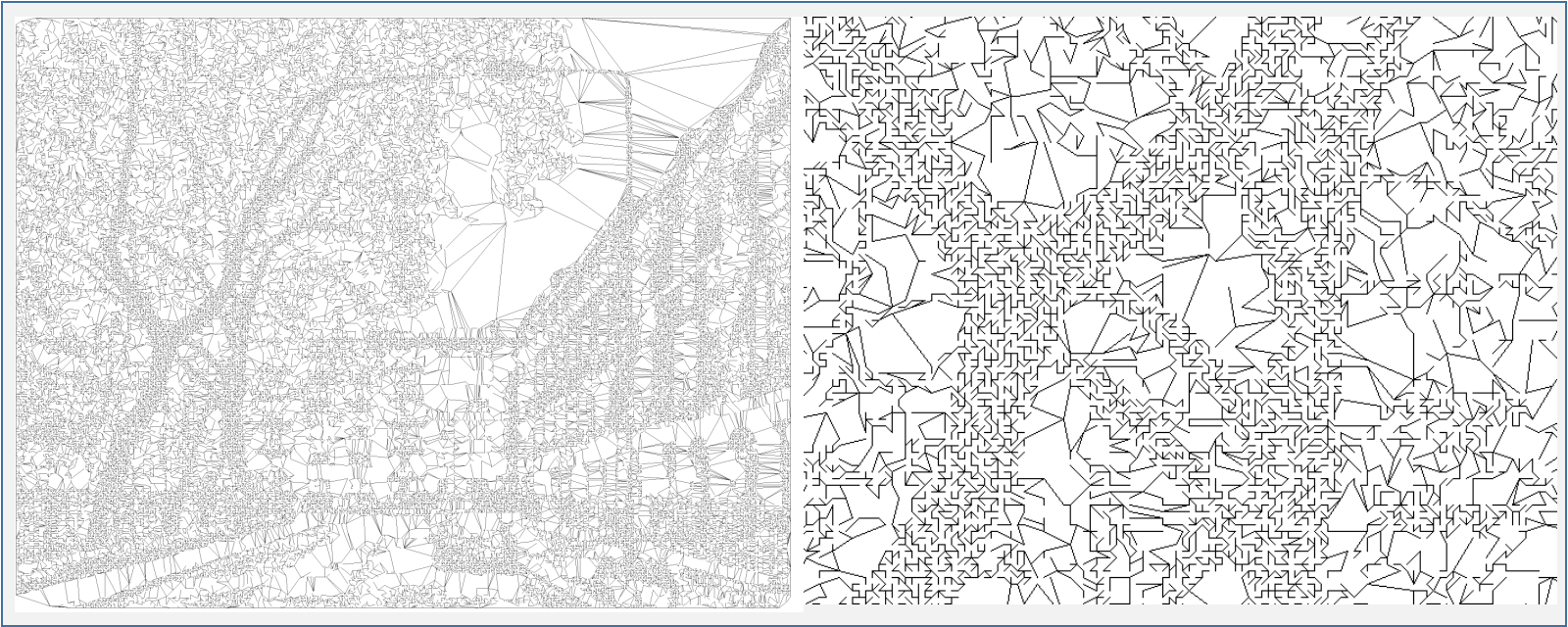 Figure 2. The Delaunay maze (left panel) and a detail (right panel).
Figure 2. The Delaunay maze (left panel) and a detail (right panel).
2. Rectangle maze
2.1. Specification
Each black pixel is replaced by a rectangle. The vertices of the maze are these rectangles and the blank areas enclosed by them. The links are created by removing the walls of the rectangles.
2.2. Maze objects
2.2.1. Object types
There are two kinds of objects. The grid rectangles with which the black pixels are subtituted as shown in the left and middle panels of Figure 4. The location of these are simply given by their 1D or 2D grid indices. They will be identified by the former one in the pre-maze.
These rectangles – and the image borders – enclose single or connected blank pixels of the image. They form the of other type of objects which will be called components. The collection of the grid rectangles can be viewed as the foreground and the regions of connected white ones as the background. In the image segmentation parlance, the latter ones are called connected components. These are of irregular shape and can neighbour a wast range of number of black pixels, yet they correspond to a single vertex in adjacency graph of the maze.
2.2.2. Labeling of connected components
We thus need to identify which blank pixel belongs which connected component. We could use purely graph based algorithms, such as exhaustive enumeration e.g. depth or breadth first search. Alternatively, numerical image segmentation procedures, such as the watershed algorithm may be invoked. Halfway between them lies the Hohsen–Kopelman connected component labeling algorithm. It is implemented in the label_connected_components_image function.
It takes a binary image as an input where the “black” pixels are marked. It then performs the two pass algorithm assigning negative component labels to the blank areas. It is done to avoid clashing with the grid indices of the black pixels.
Note, there are julia packages of various maturity which offer an implementation of the algorithm utilised here. I have chosen to write my own, label_connected_components_image! which is not necessarily a good practice, even if it only took a little time and I derived much joy from it. Which happens to by exactly my utility function. The result of this function is a 2D array where the foreground pixels are set to zero and the positions corresponding to connected coponents have negative values. The right panel of Figure 3. provides a view of the connected components coloured in shades of blue.
# load image
img = load("<path-to-image>")
img = imresize(img, ratio=0.25)
# quantise colours
img_binary = binarize(img, AdaptiveThreshold())
points_all = convert(Array{Int}, Gray.(img_binary))
img_labels = points_all .+ 0
Maze.label_connected_components_image!(img_labels, 0)
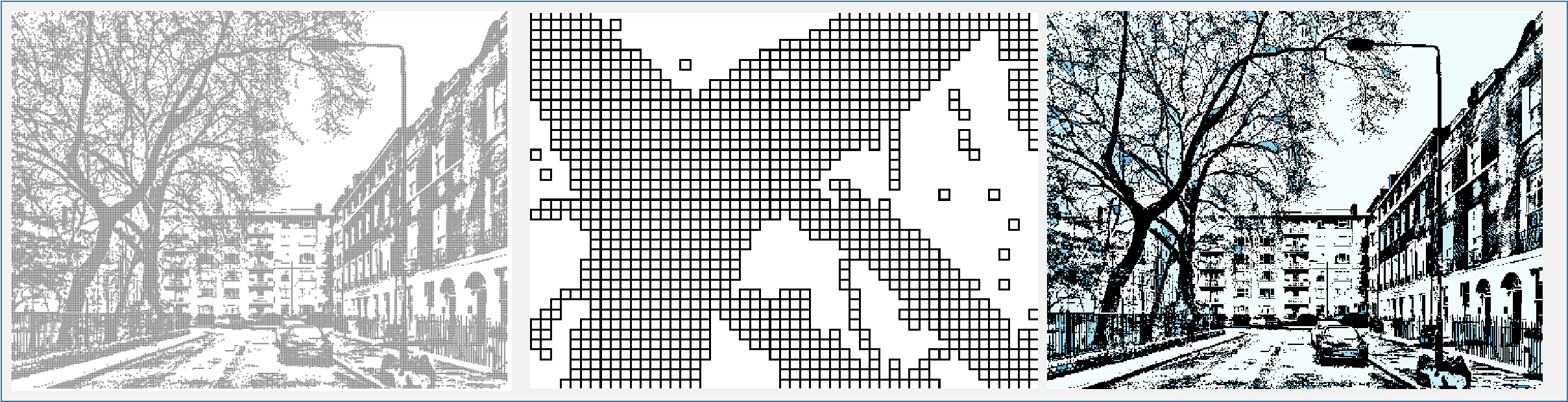 Figure 3. The black pixels replaced by squares (left panel), detail (middle panel), the connected components (right panel).
Figure 3. The black pixels replaced by squares (left panel), detail (middle panel), the connected components (right panel).
3. Pre-maze
3.1. Algorithm
Once all of the vertices, let they be standalone grid rectangles or components are labeled, their connectivity is determined. This is done in a single pass where only the grid rectangles are examined. We know that they are either connected to each other or to the components. Two components cannot share a border because they would form a single larger component.
3.2. Implementation
The ImageGridComponentGraph is a convenience structure to collate the information on the objects of the image. Itc constructor takes a labeled image (img_labels) as an argument. The connectivity is stored in a DictGraph structure (graph) introduced in the previous post.
struct ImageGridComponentGraph{Int} <: Graph{Int}
"`graph::Dict{Int, Array{Int, 1}}`: component connectivity"
graph::Dict{Int, Array{Int, 1}}
"`image_components::Array{Int, 2}`: 2D array of labeled image components"
image_components::Array{Int, 2}
end
The constructor simply iterates over all pixels. It only examines the background pixels of the labeled image. The foreground regions are defined implicitly by the background.
- take a backround pixel
- retrieve its neighbours
- loop over the neighbours
- if the neighbour is background use its grid index as a vertex
- otherwise use the component label
- save edge to the graph
function ImageGridComponentGraph(x::Array{Int, 2})
n_row, n_col = size(x)
# for lookup
grid = RectangleGraph(n_row, n_col, n_row * n_col)
connectivity = DictGraph{Int}()
# examine each pixel
for j in 1:n_col
for i in 1:n_row
# skip foreground (labeled components)
if x[i, j] != 0
continue
end
# calculate 1D index which will be the vertex
source = index_2d_to_1d_grid(i, j, n_row)
# get neighbours
targets = get_neighbours(grid, source)
# add to graph
for target in targets
# if the neighbour is a background pixel use its grid index
# otherwise use the component label
target = (x[target] == 0) ? target : x[target]
push!(connectivity, source, target)
push!(connectivity, target, source)
end
end
end
ImageGridComponentGraph(connectivity, x)
end
4. Links
The loop erased random walk algorithm is yet again invoked to select a set of edges of the image grid graph. Again, one only needs to implement the get_neighbours function for the ImageGridComponentGraph structure which is barely more than a line.
function get_neighbours(graph::ImageGridComponentGraph, vertex::Int)
get_neighbours(graph.connectivity, vertex)
end
links = make_loop_erased_random_walk_maze_links(graph)
5. Drawing object preparation
There are two kinds of links. Those that connect grid rectangles and those that communicate between grid rectangles and components. The grid rectangles are connected through a single shared side. This side is not rendered so that a visual path is created in the maze image.
A component connected to a grid rectangle can be adjacent to it at least one and at most four sides. The latter happens when the rectangle is an enclave in the component. The possibility of having more than a single side to remove needs to be dealt with.
select_sides_to_omit_component considers these two cases. The first is trivial to handle.
- the two 1D grid indices are fed to the
get_shared_sides_rectanglefunction which- forms the difference of the indices
- from which the position of the shared side is determined
- which is then saved
The second possibility is just a little more complicated. We will use the fact that the component vertices are the component labels.
- the 1D grid indices of the neighbours of the grid rectangle are retreived
- they are randomly permuted
- loop over the 1D indices
- check whether the component image value at the current index is equal to the target index
- if so,
- save index
- stop iteration
The random permutation is to ensure that all shared sides are deleted with equal probaility.
function select_sides_to_omit_component(
x::Array{Int, 2},
links::Array{Int, 2}
)
n_row, n_col = size(x)
grid = RectangleGraph(n_row, n_col)
sides_to_omit = DictGraph{Int}()
# loop over all links to find connecting sides
# `source` is always a grid rectangle
for (target, source) in eachcol(links)
# if both are grid rectangles
if source >= 1 && target >= 1
# get at which (N/E/S/W) sides the two grid rectangles meet
side_source, side_target = get_shared_sides_rectangle(
source, target, n_row
)
# save which side will not be rendered
push!(sides_to_omit, source, side_source)
push!(sides_to_omit, target, side_target)
# `source` is a grid rectangle, `target` is a component
elseif source >= 1 && target < 0
# the neighbours are given in grid 1D indices
for neighbour in shuffle(get_neighbours(grid, source))
# choose the first neighbour which matches the index of the component
if x[neighbour] == target
side_source, side_target = get_shared_sides_rectangle(
source, neighbour, n_row
)
# only save the grid rectangle side
# (components are rendered indirectly)
push!(sides_to_omit, source, side_source)
break
end
end
else
throw(ErrorException("something"))
end
end
return sides_to_omit.graph
end
6. Rendering
All foreground rectangles are looped over and their retained lines are plotted yielding the astoundingly beautiful – and this is an understatement – left panel of Figure 4. The full resolution grid maze is stored here.
{kind=link}
lines = select_lines_to_draw_component(graph, links)
img_rect = draw_lines_on_bitmap(2500, 2500, lines, 1)
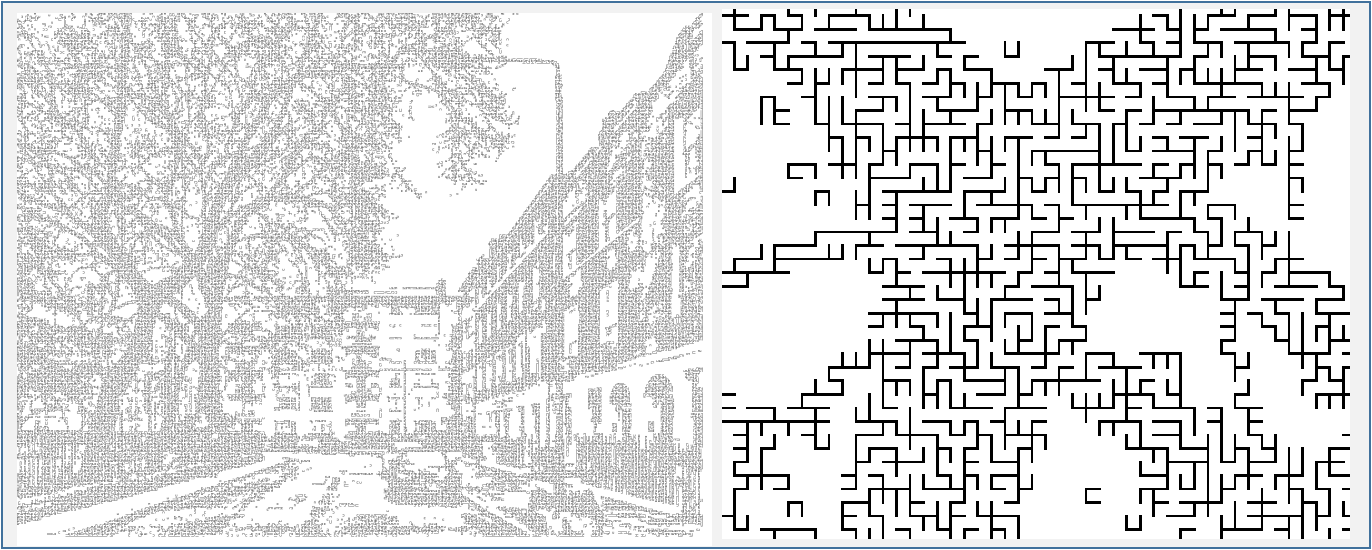 Figure 4. The entire grid maze (left panel), detail (right panel).
Figure 4. The entire grid maze (left panel), detail (right panel).